Ipari robotok


Industrial Robotics: A modern automatizálás intelligens alapja
Az ipari robotika a nehézgépek szűk szakterületéből mára a technológiai innováció egyik legdinamikusabban fejlődő területévé vált. A precíziós mérnöki megoldások, az érzékeléstechnológia, a mesterséges intelligencia és a fejlett vezérlőrendszerek ötvözésével a modern robotok újradefiniálják, mi lehetséges a gyártás és a logisztika világában.
A forradalom középpontjában a robotok új generációja áll – könnyű, intelligens és együttműködő rendszerek –, amelyek képesek biztonságosan dolgozni az emberek mellett, miközben ipari szintű teljesítményt nyújtanak. A Dobot által fejlesztett technológiák szemléletesen mutatják meg ezt az átalakulást: olyan automatizálási megoldásokat kínálnak, amelyek hozzáférhetők, rugalmasak, és szorosan illeszkednek az Ipar 4.0 alapelveihez.

A hagyományos automatizálástól az együttműködő intelligenciáig
Évtizedeken át az ipari robotok nagyméretű, rögzített rendszerek voltak, amelyek elszigetelten működtek, és biztonsági ketrecek mögött ismételték ugyanazokat a mozdulatokat. Bár rendkívül hatékonyak voltak, merev felépítésük miatt elsősorban tömeggyártásra készültek, nem pedig rugalmas alkalmazásra.
Az együttműködő robotok (kobotok) megjelenése döntő fordulatot hozott ebben a szemléletben. A kobotokat úgy tervezték, hogy biztonságosan osszák meg a munkateret az emberekkel, és viselkedésüket dinamikusan igazítsák erőérzékelés, közelségérzékelés és valós idejű visszacsatolás segítségével. Ez az új robotkategória hidat képez az emberi kézügyesség és a robotikai precizitás között, lehetővé téve az automatizálást még kis- és közepes méretű gyártókörnyezetekben is.
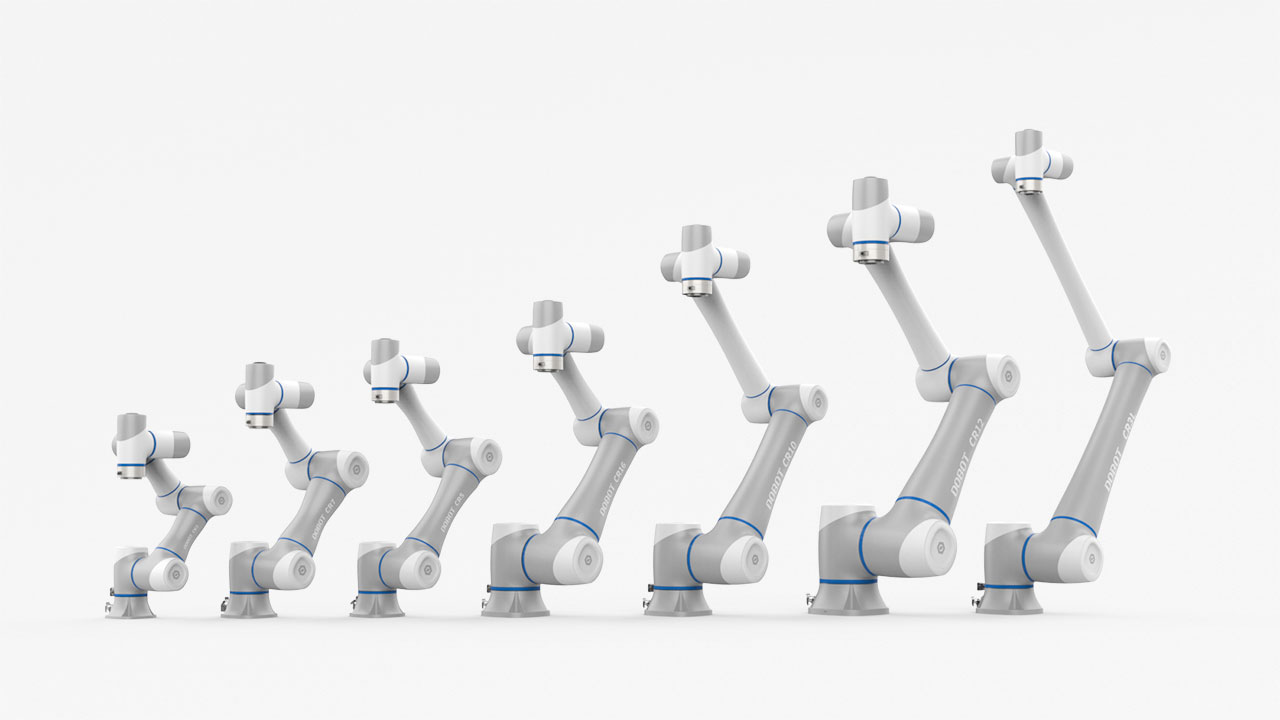
A Dobot ipari robotikához való megközelítése jól példázza ezt az evolúciót. A vállalat kompakt, rugalmas rendszerek fejlesztésére összpontosít, amelyek zökkenőmentesen illeszkednek a meglévő munkafolyamatokba, így a cégek teljes gyártósoruk újratervezése nélkül is automatizálhatnak. Együttműködő robotkarjaik széles választéka többféle teherbírást fed le – a finom összeszerelési feladatokra alkalmas könnyű manipulátoroktól egészen a raklapozásra és gépkiszolgálásra képes nagy teljesítményű karokig.
A Dobot robotikai tervezési filozófiájának lényege
A Dobot tervezési filozófiája három alapelv köré épül: biztonság, intelligencia és hozzáférhetőség. Minden robot egy nagyobb ökoszisztéma részeként születik meg, amely az érzékelést, a mozgást és a vezérlést egy koherens, felhasználóbarát egésszé egyesíti.
Minden robotkar nagy pontosságú szervomotorokkal és fejlett mozgásvezérlőkkel rendelkezik, amelyek biztosítják a sima és precíz mozgást több tengely mentén. A szerkezet könnyű ötvözetek és harmonikus hajtóművek kombinációjával biztosítja a merevséget és az ismételhetőséget, lehetővé téve a submilliméteres pontosságot még dinamikus mozgás közben is. Ezen képességeket fejlett szoftver egészíti ki, amely pályatervezés-optimalizálást és adaptív vezérlést tesz lehetővé, így a magas sebességű gyártási ciklusok során is következetes minőséget biztosít.
SafeSkin – Proaktív ember–robot biztonság
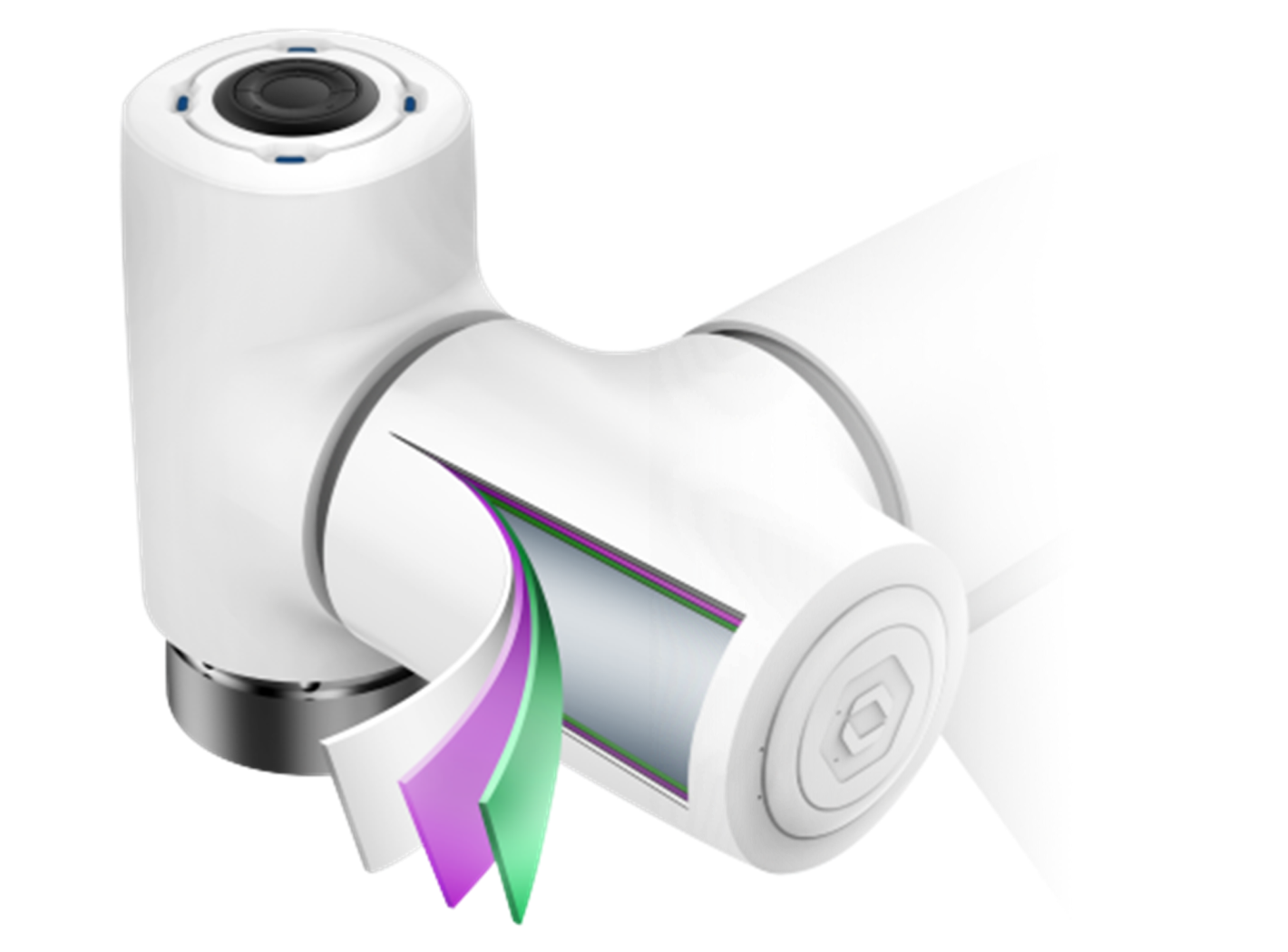
A Dobot egyik legjelentősebb újítása a SafeSkin, egy intelligens, ütközés előtti érzékelési technológia, amely alapjaiban változtatja meg az ember és a robot közötti interakciót.
A hagyományos rendszerekkel ellentétben, amelyek csak fizikai érintkezés után reagálnak, a SafeSkin proaktívan működik. A robot felületébe integrált közelségérzékelők segítségével észleli a közelgő tárgyakat vagy embereket. Amikor egy személy keze vagy teste belép a robot biztonsági mezőjébe, a SafeSkin jelet küld a vezérlőnek, amely azonnal lelassítja vagy megállítja a mozgást, még az ütközés előtt.
Ha a robot egyedül működik, teljes ipari sebességgel dolgozhat.
Ha ember közelít, automatikusan együttműködő módba vált, csökkentve a sebességet és az erőt.
Amint a terület ismét szabad, zökkenőmentesen folytatódik a normál működés.
Ez az intelligens biztonsági mechanizmus lehetővé teszi, hogy a robotok zökkenőmentesen dolgozzanak emberek mellett, minimalizálva a leállásokat, és megszüntetve a fix akadályok vagy ketrecek szükségességét. Gyakorlatban ez azt jelenti, hogy a gyártási cellák kisebbek, rugalmasabbak és könnyebben átalakíthatók.
Fejlett fogó- és végszerszám-ökoszisztéma
A robot igazi sokoldalúsága a végszerszámában rejlik – abban az eszközben, amely összekapcsolja a robotot a feladatával. A Dobot átfogó fogó- és végszerszám-ökoszisztémát fejlesztett ki, amely jelentősen bővíti az alkalmazási lehetőségeket az iparágak széles spektrumában.
Mechanikus és adaptív fogók
A mechanikus két- és háromujjas fogók megbízható megfogást biztosítanak merev alkatrészek számára. Erősségük elektronikusan szabályozható, lehetővé téve a finom vagy nehéz tárgyak biztonságos kezelését. Néhány modell erőérzékelőkkel van felszerelve, amelyek észlelik, hogy a tárgy megfelelően meg lett-e fogva, ezzel biztosítva a minőségellenőrzést az automatizált összeszerelés során.

Vákuumos és puha fogók
A szabálytalan vagy törékeny tárgyak – például üveg, csomagolóanyagok vagy élelmiszerek – esetében a vákuumos és puha, elasztomer alapú fogók lehetővé teszik a biztonságos kezelést anélkül, hogy károsítanák az anyagot. Adaptív felületük finoman illeszkedik a tárgyakhoz, biztosítva a stabilitást még akkor is, ha azok formája változó.

Mindezek a végszerszámok plug-and-play csatlakozásokkal illeszthetők, ami azt jelenti, hogy percek alatt cserélhetők a rendszer újrakonfigurálása nélkül. Ez a moduláris felépítés lehetővé teszi, hogy egyetlen robot a nap folyamán több feladatot is ellásson, maximalizálva az üzemidőt és a beruházás megtérülését.
Látás és mesterséges intelligencia integrációja
A modern robotika egyre inkább a látásra és a mesterséges intelligenciára támaszkodik az alkalmazkodóképesség eléréséhez. A Dobot robotjai 2D és 3D látórendszereket integrálnak, amelyek lehetővé teszik számukra a környezet érzékelését és megértését.
Ezek a látásmodulok kamerákat, strukturált fényt és MI-alapú képfeldolgozást alkalmaznak a következő feladatokra:
Alkatrészek felismerése tetszőleges orientációban (bin-picking),
Komponensek precíz igazítása összeszerelés közben,
Kész termékek ellenőrzése hibák vagy szabálytalanságok szempontjából,
Vonalkódok, QR-kódok és termékcímkék leolvasása.
Az MI-algoritmusokkal kombinálva ezek a rendszerek lehetővé teszik, hogy a robot valós időben hozzon döntéseket – módosítsa a pályáját, válassza ki a megfelelő eszközt, vagy akár megállapítsa, hogy egy művelet sikeres volt-e. A látásintegráció révén a robotok előre programozott gépekből autonóm, kontextusérzékeny rendszerekké válnak, amelyek képesek dinamikus gyártási környezetben működni.
Autonóm mobil manipulátor robotok (AMMR): a rugalmasság következő szintje
Ahogy a gyárak egyre dinamikusabbá válnak, nő a mobil, újrakonfigurálható automatizálás iránti igény. A Dobot erre a kihívásra az Autonóm Mobil Manipulátor Robotokkal (AMMR) válaszol — mobil platformokkal, amelyek együttműködő robotkarokkal vannak felszerelve.
Egy AMMR ötvözi az autonóm mobil robot (AMR) mobilitását a kobotok kézügyességével. Képes önállóan navigálni a gyártósoron, anyagokat szállítani a munkapontok között, és olyan feladatokat ellátni, mint a gépek betöltése, csomagolás vagy összeszerelés közvetlenül a szükséges helyen.
Lidar-szkennerek, vizuális SLAM (egyidejű lokalizáció és térképezés) és intelligens útvonaltervező algoritmusok segítségével ezek a robotok biztonságosan mozognak emberek és más berendezések között. Dinamikusan koordinálnak a termelési ütemtervekkel, automatikusan dokkolnak töltőállomásokhoz vagy munkacellákhoz.
