Oktatási célú robotok


Mi az oktatási robotika?
Az oktatási robotika egy multidiszciplináris tanulási megközelítés, amely fizikai robotokat, digitális programozási környezeteket és mesterséges intelligenciával támogatott eszközöket használ a STEM-területek (tudomány, technológia, mérnöki tudományok és matematika) – valamint egyre inkább a kreativitás, a csapatmunka és a problémamegoldás – oktatására.
Nem csupán a robotok építéséről van szó, hanem arról is, hogy a diákok megértsék, miként működnek együtt a mechanikai rendszerek, az elektronika és a szoftverek az intelligens viselkedés kialakításához.

Az egyszerű, előre meghatározott mozgásmintákat követő robotoktól kezdve a humanoid robotokon és a szakképző iskolákban használt programozható karokon át, az oktatási robotika lehetővé teszi a tanulók számára, hogy az intuitív barkácsolástól eljussanak a professzionális szintű automatizálás és mesterséges intelligencia ismeretekig.
Fő termékcsaládok az oktatási robotikában
Moduláris készletek és építőelemek (alsó- és középfokú oktatás)
Ezek képezik a robotikai oktatás alapját. A diákok moduláris elemeket – szerkezeti részeket, szervomotorokat és vezérlőket – használnak egyszerű robotok létrehozásához, amelyeket aztán vizuális programozással irányítanak. • A UBTECH uKit sorozata (uKit Explore, uKit AI, uKit Advanced) moduláris részeket, színkódolt szervomotorokat és vezérlőket kínál.

A diákok humanoidokat, autókat vagy egyedi robotokat építhetnek pontosan illeszkedő műanyag elemekből. A hozzá tartozó uKit EDU alkalmazás és uCode platform lehetővé teszi a drag-and-drop (húzd-és-ereszd) programozást Blockly és Scratch alapokon, így a diákok zökkenőmentesen léphetnek a vizuális kódolástól a Python nyelv használatához.
Ezek a készletek a következőket tanítják:
Szekvenciális logika és feltételes gondolkodás (ciklusok, if/then)
Mechanika (karok, nyomaték, egyensúly)
Érzékelőintegráció (fény, hang, távolság)
Kerekes robotok és önkiegyensúlyozó robotok
Ezeket a robotokat gyakran használják középiskolákban a mozgás, a navigáció és a vezérlési algoritmusok bemutatására.

Ultrahangos érzékelők (akadályérzékeléshez)
Infravörös érzékelők (vonalkövetéshez)
Giroszkópok/
gyorsulásmérők (kiegyensúlyozáshoz)
A programozási gyakorlatok a vezérléselméletet, a visszacsatolási hurkokat és az érzékelői adatokat integráló technikákat tanítják – ezek az alapelvek a mechatronika és az MI-robotika számára.
Humanoid robotok és átalakítható robotok
A UBTECH az egyik legismertebb fejlesztő ebben a kategóriában.
Humanoid és többformájú robotjaik, mint például az uKit AI és az uKit Explore, lehetővé teszik a diákok számára a mozgás, a gesztusok és a beszéd felfedezését.

Szervomotoros ízületek az emberhez hasonló mozgáshoz
Látásérzékelők (kamerák) arcfelismeréshez és tárgyfelismeréshez
Mikrofonok és hangszórók a beszédalapú interakcióhoz
Mesterséges intelligencia modulok a hangvezérlés és a kép alapú döntéshozatal integrálásához
A diákok kísérletezhetnek a gépi észleléssel – olyan robotokat hozhatnak létre, amelyek „látnak” és „reagálnak” –, ami intuitív, korai bevezetést nyújt a számítógépes látás és a természetes nyelvfeldolgozás alapjaiba.
Asztali robotkarok és manipulátorok
A középiskolák, egyetemek és szakképző intézmények számára a robotkarok központi szerepet töltenek be az ipari automatizálás tanulásában.

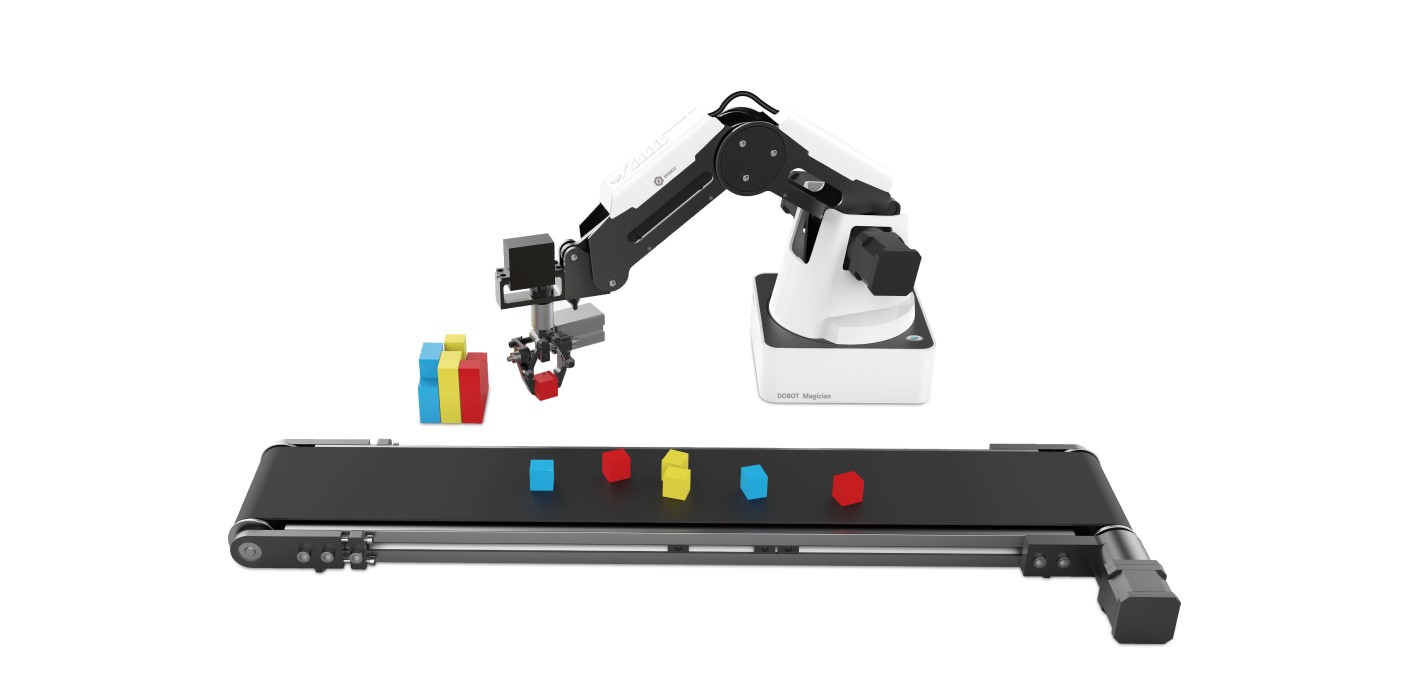
A DOBOT Magician szolgál példaként és mércéként.
Ez egy 5-tengelyes asztali robotkar, amely támogatja a pick-and-place műveleteket, lézergravírozást, 3D nyomtatást és rajzolást.
A Magician cserélhető végszerszámokkal rendelkezik (fogó, szívófej, toll, extruder), és többféle programozási lehetőséget kínál — Blockly, Python, C++ és grafikus felület.
Összeköti az elméletet a gyakorlattal:
• Kinematika (hogyan számolja ki a robotkar a pozíciót és orientációt)
• Precíz vezérlés (szervomotorok és enkóderek használatával)
• Automatizálási sorrendek (ipari összeszerelő sorokhoz hasonlóan)
• Ember–gép interakció (oktató panelekkel, virtuális vezérlőkkel)

A DOBOT emellett kínál Magician Lite-t (egy kisebb, biztonságosabb oktatási változatot) és M1 Pro-t (SCARA típusú kart haladó szakképzéshez és kutatáshoz).
Szimulátorok és virtuális robotikai platformok
A szoftveres szimulátorok kiegészítik a fizikai robotokat. Lehetővé teszik a tanulók számára a programozás, az érzékelőlogika és az MI-s forgatókönyvek gyakorlását anélkül, hogy a hardver elkopna vagy kár keletkezne.
A DOBOT Virtual Controller és az UBTECH uCode online környezetek a robotmozgás szimulációját biztosítják, lehetővé téve:
• A programozást és hibakeresést virtuálisan
• A robotmozgás 3D-s szimulációinak megtekintését
• A kód online megosztását osztálytársakkal vagy tanárokkal
Ez a megközelítés elengedhetetlen a robotikai programok méretezéséhez az osztálytermekben, valamint hibrid és távoktatási környezetekben.


Feldolgozó egységek (a robotok „agya”)


Minden robot szívében egy mikrokontroller vagy mikroszámítógép található:
• Mikrokontrollerek (MCU-k):
Kisméretű chipek, amelyek az alacsony szintű feladatokat végzik — érzékelőadatok olvasása és motorvezérlés.
Példák: Arduino, ESP32, STM32, valamint az UBTECH saját, Arduino-kompatibilis vezérlői.
Valós időben hajtják végre az utasításokat minimális késleltetéssel.
• Egylapkás számítógépek (SBC-k):
AI- és látásalapú robotokhoz használatosak.
Példák: Raspberry Pi, NVIDIA Jetson Nano.
Teljes operációs rendszereket (Linux alapú) futtatnak, és helyben képesek gépi tanulási modelleket végrehajtani („edge AI”).
Az UBTECH MI-robotjaiban a fedélzeti számítógép közvetlenül feldolgozza a kamera adatait objektumfelismeréshez és gesztuskövetéshez.
