DOBOT COBOT CR7
Braccio Robotico Industriale Collaborativo
Il Dobot CR7 è un cobot industriale di medie dimensioni con una taglia compatta e una capacità di carico di 7 kg, permettendo un'ampia gamma di automazioni di produzione con il braccio robotico. È disponibile con una vasta gamma di utensili terminali e applicazioni, rendendolo uno strumento estremamente utile per tutte le aree dell'industria. È inoltre un eccellente strumento per la formazione professionale, l'istruzione superiore, la logistica, la simulazione di produzione e molte altre applicazioni.
Implementazione flessibile, rapida esecuzione
Migliora la flessibilità del flusso di lavoro e l'efficienza produttiva con un robot collaborativo CR facile da installare che può essere configurato in soli 20 minuti e operativo in fino a 1 ora.
Facile da accedere, facile da imparare

Il software e la tecnologia aritmetica di Dobot rendono la serie CR di robot collaborativi intelligenti e facili da operare e gestire. Grazie al software e alla formazione manuale, può imitare accuratamente i movimenti umani. Non sono necessarie competenze di programmazione.
Sistema di sicurezza avanzato e altro
Il vantaggio dei robot collaborativi è che sono dotati di sensori di pressione nell'alloggiamento, che permettono al robot di interrompere il suo lavoro attuale se la pressione supera una soglia, e il sistema non continuerà finché la pressione non sarà rilasciata. Con questa aggiunta, l'efficienza e la sicurezza del lavoro uomo-robot vengono portate a nuovi livelli.
Espandibile, compatibile
La serie di robot collaborativi CR è anche consigliata per le sue interfacce di comunicazione universali, oltre alla sua vasta gamma di utensili terminali. Dotata di interfacce multiple di I/O e di comunicazione, la serie di cobot CR è ampiamente espandibile e compatibile con una vasta gamma di utensili di estremità del braccio. Di conseguenza, i cobot CR possono soddisfare una vasta gamma di esigenze e possono essere utilizzati in una varietà di situazioni applicative.
Caratteristiche principali
Nome del Prodotto ```html
| DOBOT CR7
``` |
Peso ```html
| 24,5kg
``````html
|
Carico massimo
``````html
| 7kg
``````html
|
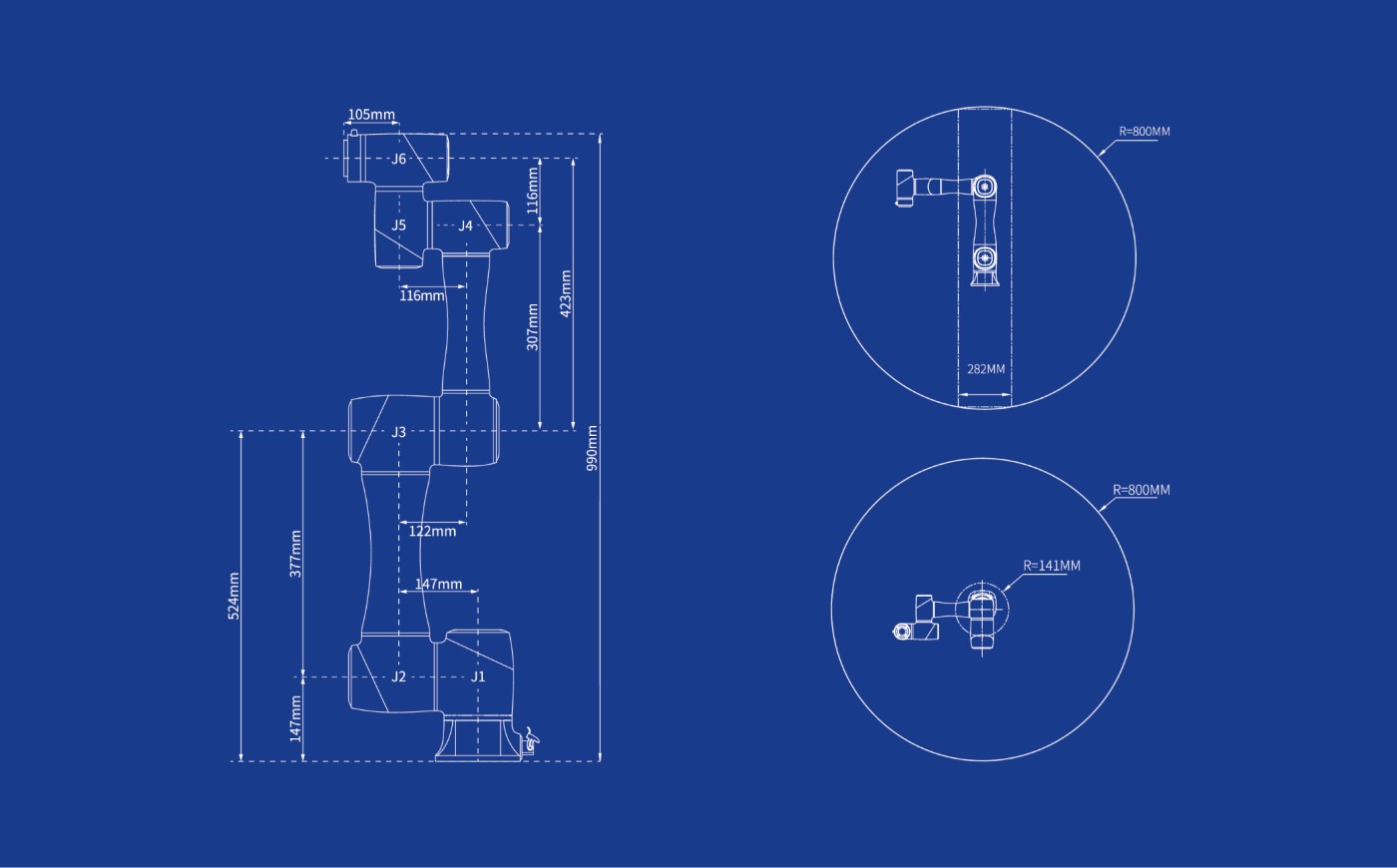
Raggio di lavoro massimo
``````html
| 990mm
``` | |
Tensione Nominale | CC48V | |
Velocità massima dell'utensile terminale (TCP) ```html
| 3m/s
``` |
Gamma di Movimento delle Articolazioni | J1 | ±360° |
J2 | ±360° |
J3 ```html
| ±160°
``` |
J4 | ±360° |
J5 | ±360° |
J6 | ±360° | |
Velocità massima delle giunture ```html
| J1/J2
``````html
| 180°/s
``````html
|
J3/J4/J5/J6
``````html
| 180°/s
``` |
Interfaccia I/O End-Tool | DI/DO/AI | 2 |
AO | 0 |
Interfaccia di comunicazione | Comunicazione ```html
| RS485
``` |
Controller I/O | DI | 16 ```html
|
FARE
``` | 16 | |
IA/AO | 2 ```html
|
Encoder Incrementale ABZ
``` | 1 |
Precisione ripetuta ```html
| ±0,02mm
``` |
Comunicazione | TCP/IP, Modbus, EtherCAT, WIFI | |
Grado di protezione IP ```html
| IP54
``````html
|
Temperatura di esercizio
``` | 0~45° |
Potenza ```html
| 150W
```
| |
Materiali | Lega di alluminio, plastica ABS |
End-Tools

Gli utensili finali sono i dispositivi che possono essere montati alle estremità dei bracci robotici. La serie di robot collaborativi DOBOT CR è compatibile con una vasta gamma di utensili finali, quindi sarà in grado di soddisfare anche le esigenze più specifiche della tua attività.
- Imballaggio e pallettizzazione
- Manipolazione
- Lucidatura
- Avvitamento
- Incollaggio, alimentazione e saldatura
- Assemblaggio
- Gestione delle macchine
- CNC
- Controllo qualità
- Stampaggio a iniezione
Contenuto del pacchetto


Il braccio robotico è composto da due unità. Un braccio robotico e un'unità di controllo per la sua programmazione. L'unità di controllo collega il braccio robotico al computer, in modo da poter convertire i programmi scritti nell'ambiente di sviluppo e controllare il braccio robotico di conseguenza. Il controller ha le porte IO a cui possono essere collegati i vari accessori, incluso l'interruttore di arresto di emergenza.
* Premendo l'interruttore di arresto di emergenza, il robot si fermerà immediatamente. Oltre alle due unità, il pacchetto include i cavi di alimentazione per le unità e il cavo IO per la connessione.
6 assi, 4 modalità di movimento
Il braccio robotico può muoversi dal punto A al punto B connettendo due punti di coordinate in 3 modalità:
Movimento Interpolato con Giunti: Il movimento può essere implementato utilizzando programmi GO e MoveJ, che consente al braccio robotico di riposizionarsi da punto A a punto B interpolando l'angolo dei giunti del braccio robotico senza tenere conto della posizione dell'utensile finale
Movimento Interpolato Linearmente: Il movimento può essere implementato tramite Move, che consente al robot di collegare le coordinate del punto A e del punto B, orientandosi in base alla posizione del cielo, guidando l'utensile di estremità in linea retta. Nel caso del movimento lineare, si può fare una distinzione tra l'uso della modalità salto, in cui l'utensile di estremità sposta entrambi i punti di coordinate alle loro posizioni finali, oppure applica un arrotondamento per eseguire un movimento continuo, tenendo conto delle coordinate del punto.
ARC - Movimento Circolare Interpolato: Il robot collega i punti A e B lungo un arco tramite un punto ausiliario C, eseguendo così un movimento ad arco tenendo conto della posizione dell'utensile finale
Cerchio - Movimento interpolato circolare: Il robot collega i punti A e B tramite un punto ausiliario C e compie il suo movimento descrivendo una forma circolare, tenendo conto della posizione dell'utensile finale.
La programmazione può essere realizzata in diversi modi. Esempi includono:
Riproduzione del movimento dell'utensile finale: un metodo di programmazione correlato è il Teach & Playback programming, un modo di programmare i bracci robotici che non richiede conoscenze di programmazione per impostare i parametri di un compito. Il programmatore può muovere liberamente il braccio robotico premendo e tenendo premuto un pulsante di sblocco di sicurezza, e quindi rilasciarlo per stabilizzare il braccio in posizione. Nell'interfaccia di programmazione, queste coordinate possono essere visualizzate e archiviate come punto coordinato che il braccio robotico deve toccare durante l'esecuzione di un compito. Salvando i punti, è possibile successivamente muovere il braccio robotico senza alcuna abilità di programmazione.
Programmazione basata su blocchi (Drag and Drop): anche conosciuta come programmazione grafica, rende più facile l'apprendimento della programmazione visualizzando funzioni, variabili e modalità operative. Il principio di funzionamento si basa sul collegamento dei blocchi, ossia i blocchi che rappresentano ciascuna funzione possono essere programmati in sequenza per programmare il braccio robotico.
Script Python: oggi, Python è uno dei linguaggi di programmazione più popolari ed è la prima scelta di tutti i principianti. Con la sua sintassi facile da comprendere e una grande libreria, è utilizzato non solo per l'automazione ma anche per lo sviluppo dell'intelligenza artificiale. Pertanto, la robotica ha anche scelto Python per massimizzare le capacità dei robot.
DobotStudio, l'ambiente di sviluppo per il braccio robotico, viene fornito con le librerie necessarie per controllare il braccio robotico di default, quindi tutto ciò che devi fare è consultare la documentazione e creare il tuo programma Python per far funzionare il tuo braccio robotico.

Sistemi di coordinate
Il sistema di coordinate del sistema del braccio robotico è suddiviso in quattro sistemi di coordinate:
Sistema di coordinate di base: il sistema di coordinate di base definisce le coordinate, la posizione e il movimento dell'attrezzo finale, basati sul sistema di coordinate di base, che è definito dal sistema di coordinate cartesiano.
Sistema di coordinate congiunte: Il sistema di coordinate di una cerniera è definito dai possibili movimenti di ciascuna cerniera
Sistema di coordinate dell'utensile finale: Sistema di coordinate che definisce la distanza di offset e l'angolo di rotazione, la cui origine e orientamento variano a seconda della posizione del pezzo sul tavolo del robot
Sistema di Coordinate Utente: Un sistema di coordinate mobile utilizzato per rappresentare attrezzature come dispositivi di fissaggio e banchi da lavoro. L'orientamento dell'origine e degli assi può essere determinato in base ai requisiti del sito, per misurare i dati di punti all'interno dell'area di lavoro e per disporre convenientemente i compiti.
Punti di singolarità
Quando il robot si muove nel sistema di coordinate cartesiane, la velocità risultante dei due assi non può essere in nessuna delle due direzioni se le direzioni sono allineate, il che comporta una degradazione dei gradi di libertà del robot. Il robot ha tre punti di singolarità.
Investimento sicuro, affidabilità eccezionale
La solida e stabile qualità costruttiva della serie CR di bracci robotici collaborativi promette una durata fino a 32.000 ore, combinata con bassi costi di esercizio. Questo rende la serie CR non solo un investimento sicuro, ma anche un ritorno sull'investimento.
