DOBOT COBOT CR10S
Kollaborativer Industrieroboterarm mit SafeSkin-Zubehör
CR10S ist der Schlüssel zur sicheren Mensch-Roboter-Kollaboration. Mit dem DOBOT SafeSkin-Zusatz ausgestattet, wurde der CR10S-Roboterarm entwickelt, um Automatisierungslinien zu vereinfachen und ein hohes Maß an Sicherheit für Menschen zu gewährleisten.
Der Dobot CR10S ist ein mittelgroßer Industrieroboter mit kompakten Abmessungen und einer Tragfähigkeit von 10 kg, der eine breite Palette von Produktionsautomatisierungen mit dem Roboterarm ermöglicht. Er ist mit einer Vielzahl von Endwerkzeugen und Anwendungen erhältlich, was ihn zu einem äußerst nützlichen Werkzeug für alle Bereiche der Industrie macht. Er ist auch ein hervorragendes Werkzeug für die berufliche Ausbildung, höhere Bildung, Lagerhaltung, Produktionssimulation und viele andere Anwendungen.
FLEXIBLE INSTALLATION, SCHNELLE UMSETZUNG
Steigern Sie die Flexibilität des Arbeitsablaufs und die Produktivität mit einem einfach bereitzustellenden CR-Kollaborationsroboter, der in nur 20 Minuten eingerichtet werden kann und innerhalb von bis zu 1 Stunde betriebsbereit ist. Nachdem Sie die Steuerkonsole angeschlossen und den Roboterarm befestigt haben, verbinden Sie einfach die beiden Geräte und schalten das System ein.
EINFACH ZUGÄNGLICH, EINFACH ZU LERNEN

Die Software und die Arithmetiktechnologie von Dobot machen die CR-Serie kollaborativer Roboter intelligent und einfach zu bedienen und zu verwalten. Dank der Software und manuellen Schulungen kann sie menschliche Bewegungen genau nachahmen. Programmierkenntnisse sind nicht erforderlich. Dies wird durch seine blockbasierte Entwicklungsumgebung erleichtert, die es überflüssig macht, komplexe Programmbibliothekssysteme und Funktionen zu erlernen.
Falls Sie über vorherige Programmierkenntnisse verfügen, unterstützt das Robotersystem die Programmiersprache Python, sodass Sie den Roboter optimal nutzen können.
SafeSkin-Technologie - Nutzung von elektromagnetischer Induktion
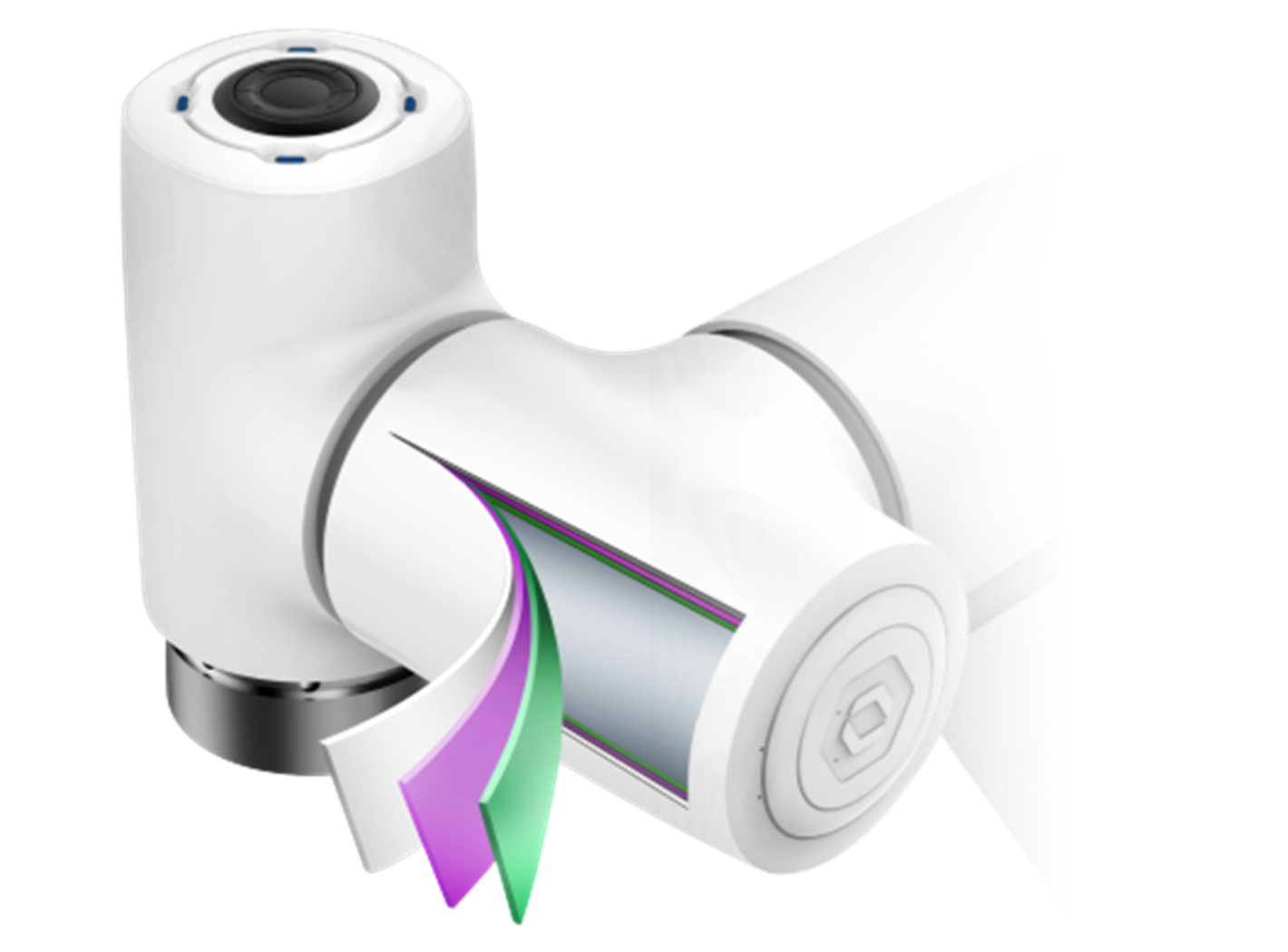
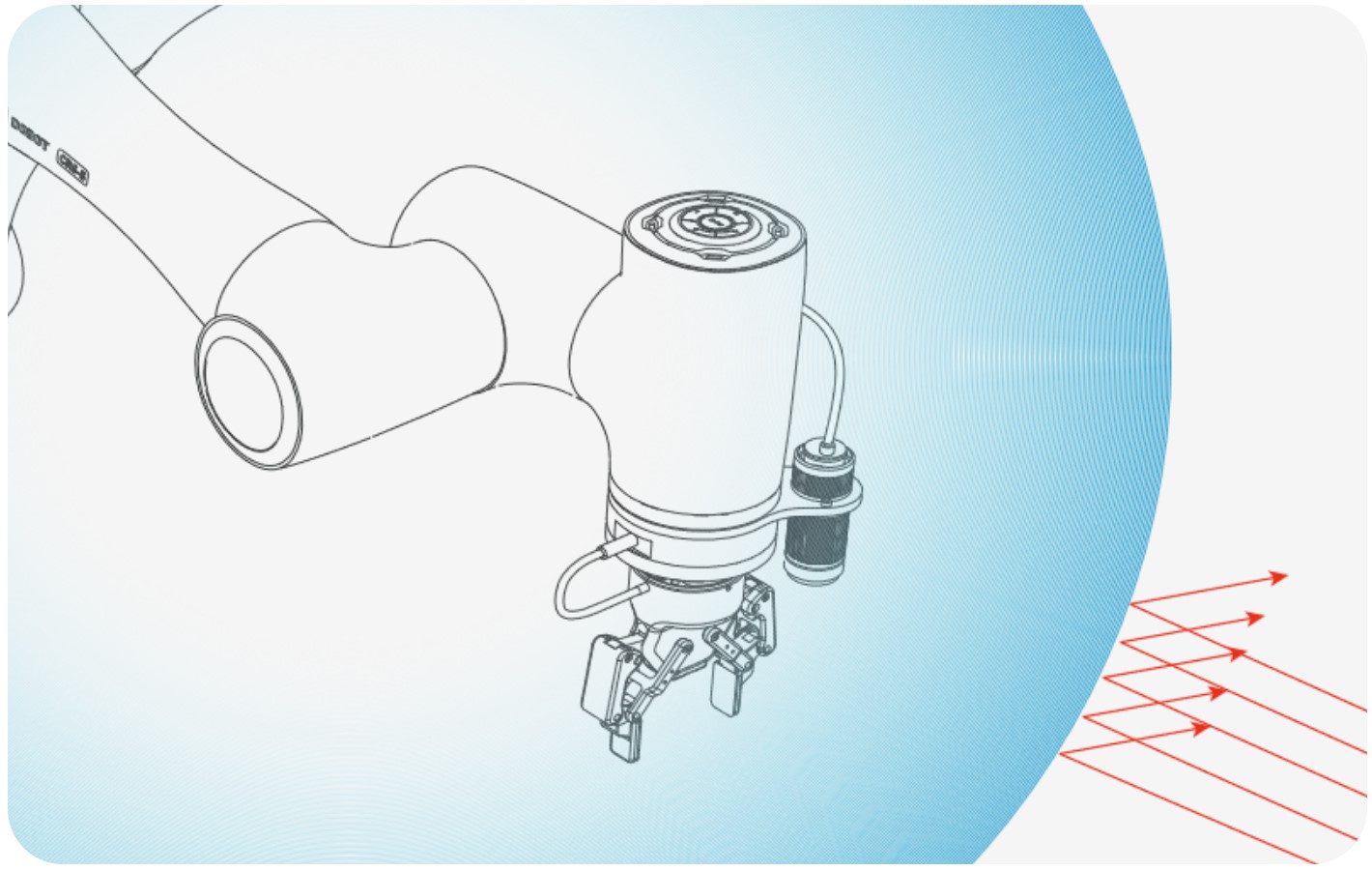
DOBOTs proprietäre Sicherheitsentwicklung, die es dem Roboterarm ermöglicht, nicht nur Unfälle zu verhindern, sondern auch zu vermeiden. Mithilfe von elektromagnetischer Induktion sorgt eine Silikonhülle mit Sensoren dafür, dass der Roboter seine Umgebung wahrnimmt. Die Hülle erzeugt ein elektromagnetisches Feld entlang der Hülle des Roboters, das durch jeden Fremdkörper in seiner Umgebung oder der sich um ihn bewegt, gebrochen wird, wodurch der Sensor ein Signal an die zentrale Verarbeitungseinheit des Roboters sendet. Dies bewirkt, dass der Roboter sofort stoppt.
Sein Betrieb wird ausgesetzt, bis die Integrität des Magnetfelds wiederhergestellt ist, d.h. bis das Fremdobjekt die unmittelbare Umgebung des Roboters verlässt. Sobald sein Arbeitsweg wieder frei ist, nimmt der Roboter automatisch seine Arbeit wieder auf, ohne den Produktionsprozess zu gefährden.
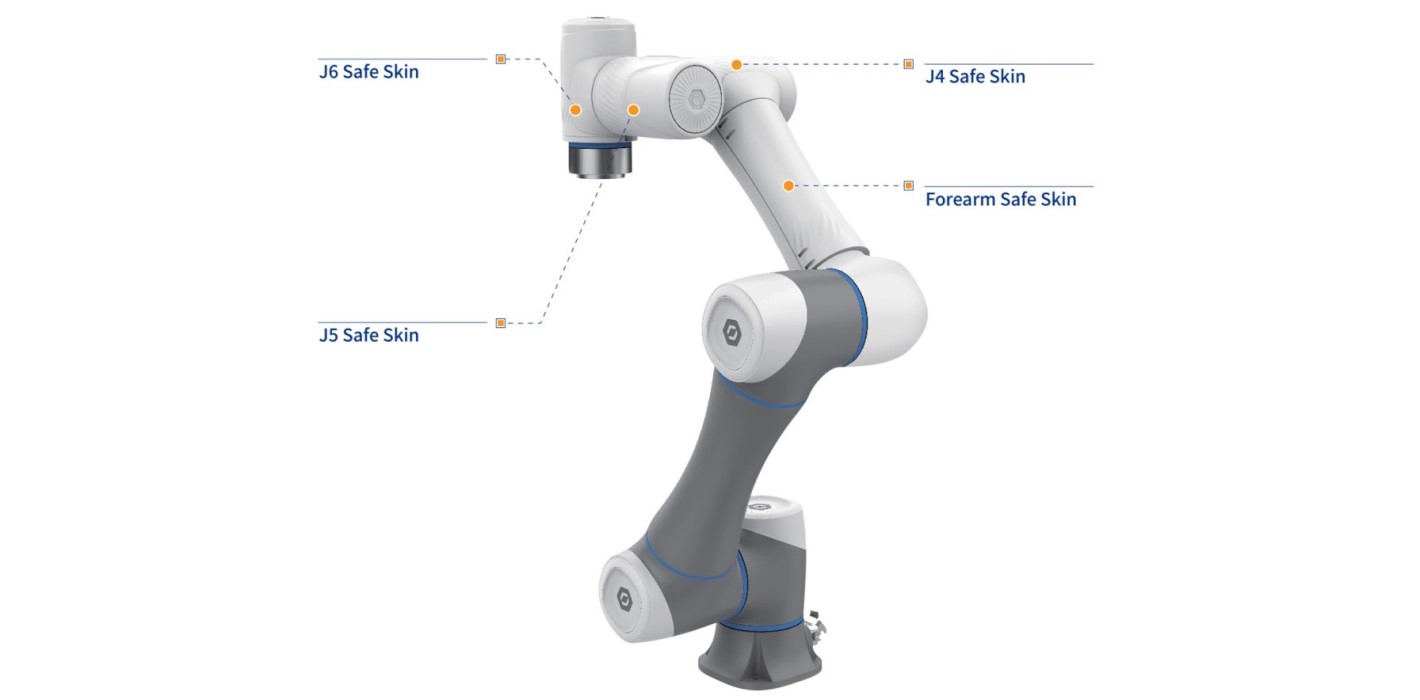
Das SafeSkin-Paket enthält 4 Überzüge: den Unterarmüberzug, den Handgelenküberzug J4, den Handgelenküberzug J5 und den Gelenküberzug J6.
Die Empfindlichkeit variiert auch je nach den verschiedenen Materialien. Während menschliche Haut das höchste Empfindlichkeitsniveau aufweist (Hüllen sind am empfindlichsten), liegt Plastik am niedrigsten. Parameter, die mit der Prävention zusammenhängen, wie Beschleunigung und Geschwindigkeit, können in der Entwicklungssoftware des Roboters eingestellt werden.
Erweiterbar, kompatibel
Die CR-Collaborative-Roboter-Serie wird auch wegen ihrer universellen Kommunikationsschnittstellen sowie der breiten Palette an Endwerkzeugen empfohlen. Mit mehreren I/O- und Kommunikationsschnittstellen sind die CR-Cobot-Serien weitreichend erweiterbar und kompatibel mit einer Vielzahl von End-of-Arm-Geräten. Dadurch können CR-Cobots eine Vielzahl von Anforderungen erfüllen und in verschiedensten Anwendungssituationen eingesetzt werden.
Parameter
Produktname | DOBOT CR10S |
Gewicht | 40 kg |
Maximale Arbeitsbelastung | 10 kg |
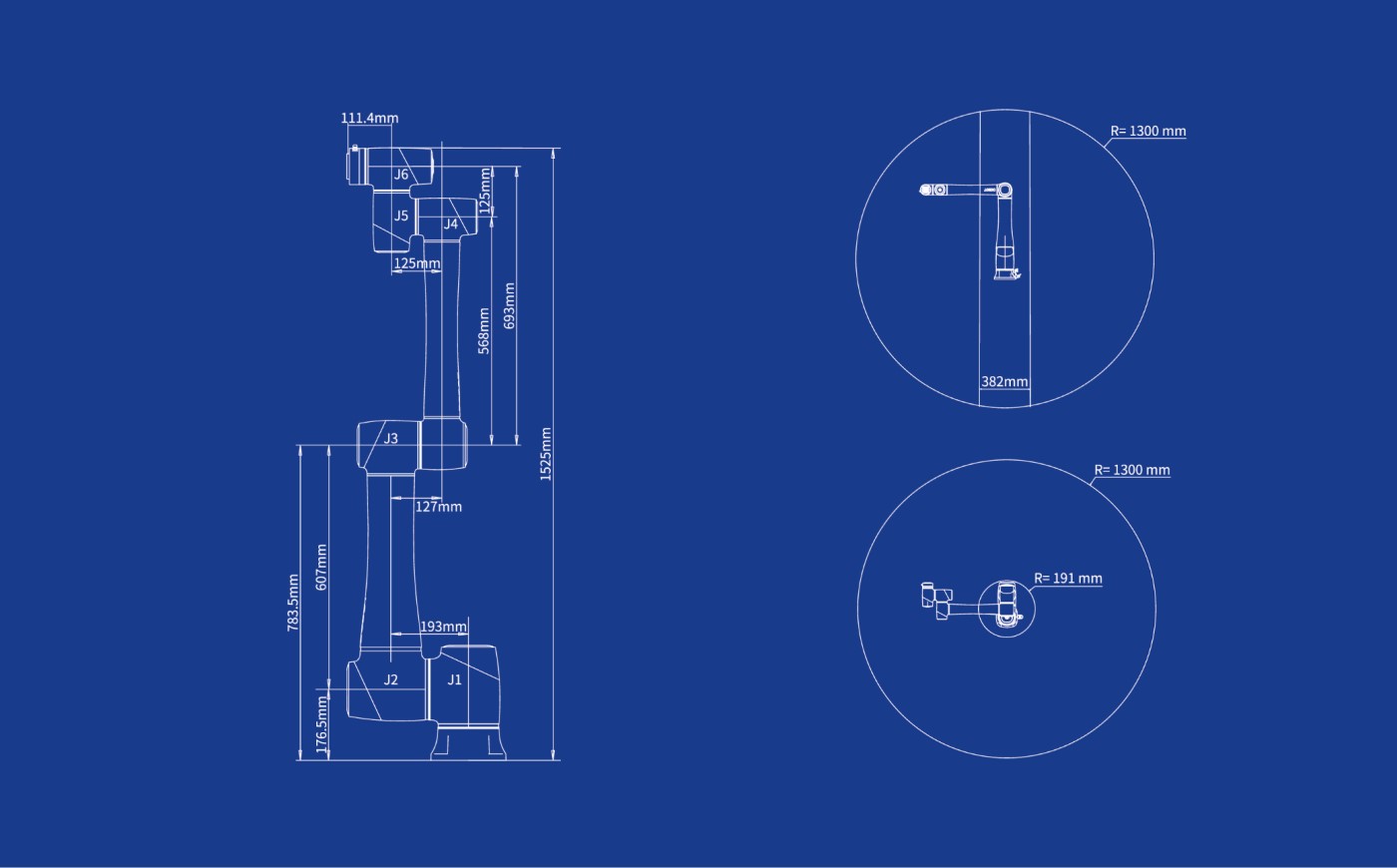
Maximaler Arbeitsradius | 1525 mm |
Nennspannung | DC48V |
Maximale Geschwindigkeit des Endwerkzeugs (TCP) | 4 m/s |
Bewegungsumfang der Gelenke | J1 | ±360° |
J2 | ±360° |
J3 | ±160° |
J4 | ±360° |
J5 | ±360° |
J6 | ±360° |
Maximale Geschwindigkeit der Gelenke | J1/J2 | 120°/s |
J3/J4/J5/J6 |
|
J3/J4/J5/J6 |
|
180°/s | Endgeräte I/O-Schnittstelle | Mi/Do/Fr | 2 |
AO | 0 |
Kommunikationsschnittstelle | Kommunikation | RS485 |
Controller E/A | DI | 16 |
MO/MI | 16 |
KI/AO | 2 |
ABZ Inkrementalgeber | 1 |
Wiederholte Genauigkeit | ±0.03 mm |
Kommunikation | TCP/IP, Modbus, EtherCAT, WIFI | TCP/IP, Modbus, EtherCAT, WIFI | TCP/IP, Modbus, EtherCAT, WIFI | TCP/IP, Modbus, EtherCAT, WIFI |
Schutzart | IP54 |
Arbeitstemperatur | 0~45° |
Leistung | 350W |
Materialien | Aluminiumlegierung, ABS-Kunststoff |
Endgeräte

Endeffektoren sind Geräte, die an den Enden der Roboterarme montiert werden können. Die DOBOT CR-Serie von kollaborativen Robotern ist mit einer Vielzahl von Endeffektoren kompatibel, sodass sie selbst die spezifischsten Anforderungen Ihres Unternehmens erfüllen kann. Ob Schweißen, Palettieren, Laden, Verschrauben, Sortieren, Montage oder Qualitätskontrolle - jeder Prozess kann mit vakuum- oder elektronisch betriebenen Greifern, MODBUS-Einheiten für Kommunikation und Automatisierung oder Förderband- und visuellen Zubehörteilen ausgestattet werden, um die Effizienz des Roboterarms zu maximieren, wie zum Beispiel:
- Verpacken und palettieren
- Abwicklung
- Polieren
- Verschrauben
- Kleben, Zuführen und Schweißen
- Montage
- Maschinenbedienung
- CNC
- Qualitätskontrolle
- Spritzguss
Inhalt des Pakets
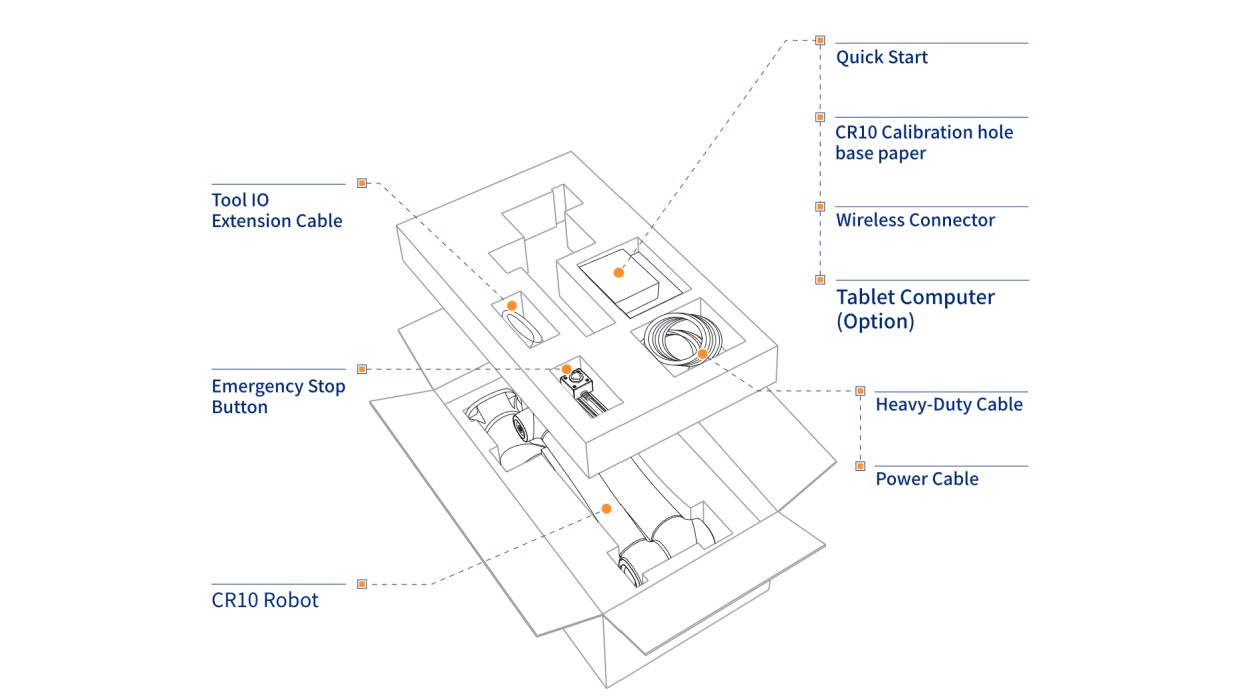

Der Roboterarm besteht aus zwei Einheiten. Einem Roboterarm und einer Steuereinheit zum Programmieren. Die Steuereinheit ist ein Computer, der mit dem Roboterarm kommuniziert und ihn steuert. Die Steuereinheit verfügt über IO-Ports, an die verschiedene Zubehörteile angeschlossen werden können, einschließlich des Not-Aus-Schalters. Um eine Verbindung mit Ihrem Computer oder Ihrem Smartgerät herzustellen, verfügt die Steuereinheit über einen USB-Anschluss zum Anschließen des WLAN-Moduls und einen Ethernet-Anschluss, wenn Sie Ihren Roboterarm über eine Kabelverbindung steuern und programmieren möchten.
*Das Drücken des Not-Aus-Schalters stoppt den Roboter sofort. Neben den beiden Einheiten enthält das Paket auch die Stromkabel für die Einheiten und das IO-Kabel für die Verbindung.
Das SafeSkin-Ergänzungsmittel ist ebenfalls im Paket enthalten!
Möglichkeiten, den Roboterarm zu bewegen
Der Roboterarm kann sich von Punkt A zu Punkt B bewegen, indem er zwei Koordinatenpunkte in 4 Modi verbindet:
Gemeinsame interpolierte Bewegung: Diese Bewegung kann mit GO und MoveJ implementiert werden, was es dem Roboterarm ermöglicht, sich von Punkt A nach Punkt B umzupositionieren, indem die Gelenkwinkel des Roboterarms interpoliert werden, ohne die Position des Endeffektors zu berücksichtigen
Linear interpolierte Bewegung: Die Bewegung kann durch die Anwendung von "Move" umgesetzt werden, wodurch der Roboter die Koordinaten von Punkt A und Punkt B verbindet und dabei die Position des Himmels betrachtet, um das Endwerkzeug entlang einer geraden Linie zu führen. Bei linearer Bewegung kann zwischen dem Sprungmodus unterschieden werden, bei dem das Endwerkzeug entweder die beiden Koordinatenpunkte in ihre Endpositionen bewegt oder eine Rundung der Koordinatenpunkte durchführt, um eine kontinuierliche Bewegung auszuführen.
ARC - Kreisförmige interpolierte Bewegung: Der Roboter verbindet die Punkte A und B entlang eines Bogens mittels eines Hilfspunktes C und führt somit eine Bogenbewegung unter Berücksichtigung der Position des Endeffektors aus
Kreis - Kreisförmige interpolierte Bewegung: Der Roboter bewegt sich in einer kreisförmigen Bewegung, indem er die Punkte A und B mit einem Hilfspunkt C verbindet und die Position des Werkzeugs am Ende berücksichtigt
Koordinatensysteme
Das Koordinatensystem des Roboterarmsystems ist in vier Koordinatensysteme unterteilt:
Basis-Koordinatensystem: Das Basis-Koordinatensystem definiert die Koordinaten, Position und Bewegung des Endwerkzeugs basierend auf dem Basis-Koordinatensystem, das durch das kartesische Koordinatensystem definiert ist.
Gemeinsames Koordinatensystem: Das gemeinsame Koordinatensystem wird durch die möglichen Bewegungen jedes Gelenks definiert.
Endwerkzeug-Koordinatensystem: Koordinatensystem, das den Versatzabstand und den Drehwinkel definiert, dessen Ursprung und Ausrichtungen je nach Position des Werkstücks auf dem Roboter-Tisch variieren
Benutzerkoordinatensystem: Ein bewegliches Koordinatensystem, das verwendet wird, um Ausrüstungen wie Vorrichtungen und Werkbänke darzustellen. Die Ausrichtung des Ursprungs und der Achsen kann basierend auf den Standortanforderungen bestimmt werden, um Punkt Daten innerhalb des Arbeitsbereichs zu messen und Aufgaben bequem anzuordnen
Singularitätsstellen
Wenn der Roboter sich im kartesischen Koordinatensystem bewegt, kann die resultierende Geschwindigkeit der beiden Achsen in keiner Richtung liegen, wenn die Richtungen auf einer Linie liegen, was dazu führt, dass die Freiheitsgrade des Roboters beeinträchtigt werden. Der Roboter hat drei Singularitätspunkte.
Sichere Investition, herausragende Zuverlässigkeit
Die robuste und stabile Bauqualität der CR-Serie von kollaborativen Roboterarmen verspricht eine Lebensdauer von bis zu 32.000 Stunden bei niedrigen Betriebskosten. Dies macht die CR-Serie nicht nur zu einer sicheren Investition, sondern auch zu einer Rendite.
